Two UNet models, one channel and two channels each
A Sparse-View CT Reconstruction Method Based on 2 UNET models
Didn’t produce promising results The idea was that we use 2 UNet models.
- We train first UNet
- Cancatenate training data with denoised data from the first UNet
- Feed 2 channels to a second UNet Model
- Use both unets to reconstruct the test data
The results were not very promising. Planning to improve on it.
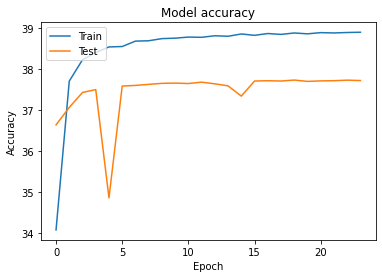
After first UNet: Avg PSNR 37.69669481448519
After second UNet: AVG PSNR 37.73871974685735
from google.colab import drive
drive.mount('/content/drive')
import os
import keras
import tensorflow as tf
import numpy as np
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
from keras.layers import Conv2D, MaxPooling2D, Input, Dense, UpSampling2D
from keras.layers import BatchNormalization, Activation, Dropout, Subtract
from keras.models import Model
from glob import glob
from keras.layers.convolutional import Conv2DTranspose
from keras.layers import concatenate
from keras import optimizers
from keras.optimizers import Adam
Using TensorFlow backend.
The default version of TensorFlow in Colab will soon switch to TensorFlow 2.x.
We recommend you upgrade now
or ensure your notebook will continue to use TensorFlow 1.x via the %tensorflow_version 1.x magic:
more info.
# %tensorflow_version 1.x
# import tensorflow as tf
print(tf.__version__)
1.15.0
# print(len(os.listdir('/content/drive/My Drive/Colab Notebooks/CT_data/sparseview_60/train')))
# print(len(os.listdir('/content/drive/My Drive/Colab Notebooks/CT_data/ndct/train')))
# # 3600
# # 3600
# print(len(os.listdir('/content/drive/My Drive/Colab Notebooks/CT_data/sparseview_60/test/')))
# print(len(os.listdir('/content/drive/My Drive/Colab Notebooks/CT_data/ndct/test/')))
# # # 354
# # # 354
ndct = sorted(glob('/content/drive/My Drive/Colab Notebooks/CT_data/ndct/train/*'))
ldct = sorted(glob('/content/drive/My Drive/Colab Notebooks/CT_data/sparseview_60/train/*'))
ndct_test = sorted(glob('/content/drive/My Drive/Colab Notebooks/CT_data/ndct/test/*'))
ldct_test = sorted(glob('/content/drive/My Drive/Colab Notebooks/CT_data/sparseview_60/test/*'))
print(len(ndct))
print(len(ldct))
print(len(ndct_test))
print(len(ldct_test))
3600
3600
354
354
The formulas below will be used to calculate the quality of the reconstruction. Higher PSNR generally indicates high quality of reconstruction.
def cal_psnr(im1, im2):
# assert pixel value range is 0-255 and type is uint8
mse = ((im1.astype(np.float) - im2.astype(np.float)) ** 2).mean()
maxval = np.amax(im1)
psnr = 10 * np.log10(maxval ** 2 / mse)
return psnr
def tf_psnr(im1, im2):
# assert pixel value range is 0-1
#mse = tf.losses.mean_squared_error(labels=im2 * 255.0, predictions=im1 * 255.0)
mse = tf.compat.v1.losses.mean_squared_error(labels=im2 * 255.0, predictions=im1 * 255.0)
return 10.0 * (tf.log(255.0 ** 2 / mse) / tf.log(10.0))
Using less data: #for i in range(0, 600). Have 3600 in all. Processing 3600 images takes aprox. 20 minutes to run. But once we create .npy aray we don’t have to rerun this code in the future and we will have .npy form of our data. Colab has 11GB RAM limit.
ndct_imgs_train = []
for i in range(0, len(ndct)):
#for i in range(0, 600):
f = open(ndct[i],'rb')
a = np.fromfile(f, np.float32)
ndct_imgs_train.append(a)
f.close()
print("len(ndct_imgs_train)....: ",len(ndct_imgs_train))
#len(ndct_imgs_train)....: 3600
len(ndct_imgs_train)....: 3600
ndct_train = np.asarray(ndct_imgs_train)
ndct_train = ndct_train.reshape(3600,512,512,1)
np.save('/content/drive/My Drive/Colab Notebooks/new_idea/ndct_train_3600', ndct_train) # save the file as "ndct_train_3600.npy"
Using different range to use less data to train #for i in range(0, 600). In all have 3600 images. It takes aprox. 20 minutes to process all 3600. But once we create .npy aray we don’t have to rerun this code in the future and we will have .npy form of our data.
ldct_imgs_train = []
for i in range(0, len(ldct)):
#for i in range(0, 600):
f = open(ldct[i],'rb')
a = np.fromfile(f, np.float32)
ldct_imgs_train.append(a)
f.close()
print("len(ldct_imgs_train)....: ",len(ldct_imgs_train))
len(ldct_imgs_train)....: 3600
ldct_train = np.asarray(ldct_imgs_train)
ldct_train = ldct_train.reshape(3600,512,512,1)
np.save('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_train_3600', ldct_train) # save the file as "sparseview_60_train_3600.npy"
only using 100 images to test
ndct_imgs_test = []
for i in range(0, len(ndct_test)):
# for i in range(0, 100):
f = open(ndct_test[i],'rb')
a = np.fromfile(f, np.float32)
ndct_imgs_test.append(a)
f.close()
print("len(ndct_imgs_test)....: ",len(ndct_imgs_test))
len(ndct_imgs_test)....: 354
ndct_test = np.asarray(ndct_imgs_test)
ndct_test = ndct_test.reshape(354,512,512,1)
np.save('/content/drive/My Drive/Colab Notebooks/new_idea/ndct_test_354', ndct_test) # save the file as "ndct_test.npy"
only using 100 images to test
# load the image
ldct_imgs_test = []
for i in range(0, len(ldct_test)):
# for i in range(0, 100):
f = open(ldct_test[i],'rb')
a = np.fromfile(f, np.float32)
ldct_imgs_test.append(a)
f.close()
print("len(ldct_imgs_test)....: ",len(ldct_imgs_test))
len(ldct_imgs_test)....: 354
ldct_test = np.asarray(ldct_imgs_test)
ldct_test = ldct_test.reshape(354,512,512,1)
np.save('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_354', ldct_test) # save the file as "sparseview_60_test.npy"
ldct_train = np.load('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_train_3600.npy') # loads saved array into variable sparseview_60_train.
ndct_train = np.load('/content/drive/My Drive/Colab Notebooks/new_idea/ndct_train_3600.npy') # loads saved array into variable ndct_train.
ldct_test = np.load('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_354.npy') # loads saved array into variable sparseview_60_test.
ndct_test = np.load('/content/drive/My Drive/Colab Notebooks/new_idea/ndct_test_354.npy') # loads saved array into variable ndct_test.
Must reshape images to train
ldct_train = np.asarray(ldct_imgs_train)
ndct_train = np.asarray(ndct_imgs_train)
ldct_train = ldct_train.reshape(600,512,512,1)
ndct_train = ndct_train.reshape(600,512,512,1)
ldct_test = np.asarray(ldct_imgs_test)
ndct_test = np.asarray(ndct_imgs_test)
# ldct_test = ldct_test.reshape(len(ldct_imgs_test),512,512,1)
# ndct_test = ndct_test.reshape(len(ldct_imgs_test),512,512,1)
ldct_test = ldct_test.reshape(100,512,512,1)
ndct_test = ndct_test.reshape(100,512,512,1)
print(ldct_train.shape)
print(ndct_train.shape)
print(ldct_test.shape)
print(ndct_test.shape)
(600, 512, 512, 1)
(600, 512, 512, 1)
(100, 512, 512, 1)
(100, 512, 512, 1)
First UNet to train.
inputs = Input((None, None,1))
c1 = Conv2D(8, (3, 3), activation='relu', padding='same') (inputs)
c1 = Conv2D(8, (3, 3), activation='relu', padding='same') (c1)
p1 = MaxPooling2D((2, 2)) (c1)
c2 = Conv2D(16, (3, 3), activation='relu', padding='same') (p1)
c2 = Conv2D(16, (3, 3), activation='relu', padding='same') (c2)
p2 = MaxPooling2D((2, 2)) (c2)
c3 = Conv2D(32, (3, 3), activation='relu', padding='same') (p2)
c3 = Conv2D(32, (3, 3), activation='relu', padding='same') (c3)
p3 = MaxPooling2D((2, 2)) (c3)
c4 = Conv2D(64, (3, 3), activation='relu', padding='same') (p3)
c4 = Conv2D(64, (3, 3), activation='relu', padding='same') (c4)
p4 = MaxPooling2D(pool_size=(2, 2)) (c4)
c5 = Conv2D(128, (3, 3), activation='relu', padding='same') (p4)
c5 = Conv2D(128, (3, 3), activation='relu', padding='same') (c5)
u6 = Conv2DTranspose(64, (2, 2), strides=(2, 2), padding='same') (c5)
u6 = concatenate([u6, c4])
c6 = Conv2D(64, (3, 3), activation='relu', padding='same') (u6)
c6 = Conv2D(64, (3, 3), activation='relu', padding='same') (c6)
u7 = Conv2DTranspose(32, (2, 2), strides=(2, 2), padding='same') (c6)
u7 = concatenate([u7, c3])
c7 = Conv2D(32, (3, 3), activation='relu', padding='same') (u7)
c7 = Conv2D(32, (3, 3), activation='relu', padding='same') (c7)
u8 = Conv2DTranspose(16, (2, 2), strides=(2, 2), padding='same') (c7)
u8 = concatenate([u8, c2])
c8 = Conv2D(16, (3, 3), activation='relu', padding='same') (u8)
c8 = Conv2D(16, (3, 3), activation='relu', padding='same') (c8)
u9 = Conv2DTranspose(8, (2, 2), strides=(2, 2), padding='same') (c8)
u9 = concatenate([u9, c1])
c9 = Conv2D(8, (3, 3), activation='relu', padding='same') (u9)
c9 = Conv2D(8, (3, 3), activation='relu', padding='same') (c9)
output_img = Conv2D(1, (3, 3), padding='same') (c9)
denoised_image = keras.layers.Subtract()([inputs, output_img])
unet_model = Model(inputs=[inputs], outputs=[denoised_image])
unet_model.compile(optimizer= 'adam', loss='mse', metrics=[tf_psnr])
unet_model.summary()
es = keras.callbacks.EarlyStopping(monitor='val_loss',
min_delta=0,
patience=5,
verbose=0, mode='auto')
history=unet_model.fit(ldct_train, ndct_train, validation_split=0.1, batch_size=20, epochs=100, callbacks =[es])
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:1033: The name tf.assign_add is deprecated. Please use tf.compat.v1.assign_add instead.
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:1020: The name tf.assign is deprecated. Please use tf.compat.v1.assign instead.
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:3005: The name tf.Session is deprecated. Please use tf.compat.v1.Session instead.
Train on 3240 samples, validate on 360 samples
Epoch 1/100
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:190: The name tf.get_default_session is deprecated. Please use tf.compat.v1.get_default_session instead.
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:197: The name tf.ConfigProto is deprecated. Please use tf.compat.v1.ConfigProto instead.
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:207: The name tf.global_variables is deprecated. Please use tf.compat.v1.global_variables instead.
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:216: The name tf.is_variable_initialized is deprecated. Please use tf.compat.v1.is_variable_initialized instead.
WARNING:tensorflow:From /usr/local/lib/python3.6/dist-packages/keras/backend/tensorflow_backend.py:223: The name tf.variables_initializer is deprecated. Please use tf.compat.v1.variables_initializer instead.
3240/3240 [==============================] - 52s 16ms/step - loss: 7.7048e-04 - tf_psnr: 31.4804 - val_loss: 4.3303e-04 - val_tf_psnr: 33.7088
Epoch 2/100
3240/3240 [==============================] - 34s 11ms/step - loss: 3.8901e-04 - tf_psnr: 34.1393 - val_loss: 3.2031e-04 - val_tf_psnr: 35.0171
Epoch 3/100
3240/3240 [==============================] - 34s 11ms/step - loss: 2.9320e-04 - tf_psnr: 35.3457 - val_loss: 2.6575e-04 - val_tf_psnr: 35.8361
Epoch 4/100
3240/3240 [==============================] - 34s 11ms/step - loss: 2.5344e-04 - tf_psnr: 35.9755 - val_loss: 2.4150e-04 - val_tf_psnr: 36.2497
Epoch 5/100
3240/3240 [==============================] - 34s 11ms/step - loss: 2.3022e-04 - tf_psnr: 36.3911 - val_loss: 2.4950e-04 - val_tf_psnr: 36.0952
Epoch 6/100
3240/3240 [==============================] - 34s 11ms/step - loss: 2.1732e-04 - tf_psnr: 36.6462 - val_loss: 2.3003e-04 - val_tf_psnr: 36.4655
Epoch 7/100
3240/3240 [==============================] - 34s 11ms/step - loss: 2.0371e-04 - tf_psnr: 36.9202 - val_loss: 2.1188e-04 - val_tf_psnr: 36.8266
Epoch 8/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.9627e-04 - tf_psnr: 37.0844 - val_loss: 2.2196e-04 - val_tf_psnr: 36.6161
Epoch 9/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.8830e-04 - tf_psnr: 37.2653 - val_loss: 1.9891e-04 - val_tf_psnr: 37.1046
Epoch 10/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.8285e-04 - tf_psnr: 37.3927 - val_loss: 1.9869e-04 - val_tf_psnr: 37.0905
Epoch 11/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.7636e-04 - tf_psnr: 37.5490 - val_loss: 1.9422e-04 - val_tf_psnr: 37.2080
Epoch 12/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.7227e-04 - tf_psnr: 37.6516 - val_loss: 1.9111e-04 - val_tf_psnr: 37.2722
Epoch 13/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.6771e-04 - tf_psnr: 37.7666 - val_loss: 1.9058e-04 - val_tf_psnr: 37.2804
Epoch 14/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.6444e-04 - tf_psnr: 37.8551 - val_loss: 1.8667e-04 - val_tf_psnr: 37.3671
Epoch 15/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.6101e-04 - tf_psnr: 37.9435 - val_loss: 1.9904e-04 - val_tf_psnr: 37.0841
Epoch 16/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.5835e-04 - tf_psnr: 38.0169 - val_loss: 1.8485e-04 - val_tf_psnr: 37.4164
Epoch 17/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.5419e-04 - tf_psnr: 38.1306 - val_loss: 1.9395e-04 - val_tf_psnr: 37.1968
Epoch 18/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.5361e-04 - tf_psnr: 38.1504 - val_loss: 1.8514e-04 - val_tf_psnr: 37.4039
Epoch 19/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.5153e-04 - tf_psnr: 38.2060 - val_loss: 2.0618e-04 - val_tf_psnr: 36.9248
Epoch 20/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.4852e-04 - tf_psnr: 38.2960 - val_loss: 1.8025e-04 - val_tf_psnr: 37.5303
Epoch 21/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.4686e-04 - tf_psnr: 38.3444 - val_loss: 1.8222e-04 - val_tf_psnr: 37.4741
Epoch 22/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.4585e-04 - tf_psnr: 38.3717 - val_loss: 1.8267e-04 - val_tf_psnr: 37.4705
Epoch 23/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.4234e-04 - tf_psnr: 38.4769 - val_loss: 1.7893e-04 - val_tf_psnr: 37.5570
Epoch 24/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.4295e-04 - tf_psnr: 38.4612 - val_loss: 1.7711e-04 - val_tf_psnr: 37.6044
Epoch 25/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3992e-04 - tf_psnr: 38.5515 - val_loss: 1.7688e-04 - val_tf_psnr: 37.6050
Epoch 26/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3895e-04 - tf_psnr: 38.5830 - val_loss: 1.7389e-04 - val_tf_psnr: 37.6879
Epoch 27/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3675e-04 - tf_psnr: 38.6529 - val_loss: 1.7448e-04 - val_tf_psnr: 37.6757
Epoch 28/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3715e-04 - tf_psnr: 38.6393 - val_loss: 1.9051e-04 - val_tf_psnr: 37.2893
Epoch 29/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3478e-04 - tf_psnr: 38.7145 - val_loss: 1.7553e-04 - val_tf_psnr: 37.6471
Epoch 30/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3399e-04 - tf_psnr: 38.7393 - val_loss: 1.7569e-04 - val_tf_psnr: 37.6487
Epoch 31/100
3240/3240 [==============================] - 34s 11ms/step - loss: 1.3400e-04 - tf_psnr: 38.7413 - val_loss: 1.7482e-04 - val_tf_psnr: 37.6701
reconstructed = unet_model.predict(ldct_test)
psnr = cal_psnr(ndct_test, reconstructed)
print("psnr .....",psnr)
psnr ..... 37.69669481448519
unet_model.save_weights("/content/drive/My Drive/Colab Notebooks/new_idea/unet_model_1.h5")
# unet_model.load_weights("unet_model_1.h5")
unet_model.load_weights("/content/drive/My Drive/Colab Notebooks/new_idea/unet_model_1.h5")
reconstructed = unet_model.predict(ldct_test)
psnr = cal_psnr(ndct_test, reconstructed)
print("psnr .....",psnr)
psnr ..... 37.69669481448519
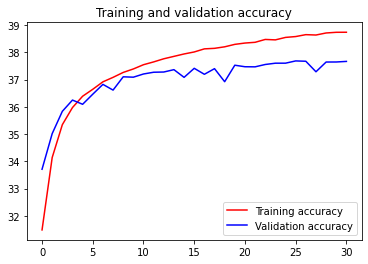
Plotting PSNR values to see the trend.
import matplotlib.pyplot as plt
acc = history.history['tf_psnr']
val_acc = history.history['val_tf_psnr']
loss = history.history['loss']
val_loss = history.history['val_loss']
epochs = range(len(acc))
plt.plot(epochs, acc, 'r', label='Training accuracy')
plt.plot(epochs, val_acc, 'b', label='Validation accuracy')
plt.title('Training and validation accuracy')
plt.legend(loc=0)
plt.figure()
plt.show()
<Figure size 432x288 with 0 Axes>
from PIL import Image
a = reconstructed[0].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_0.png')
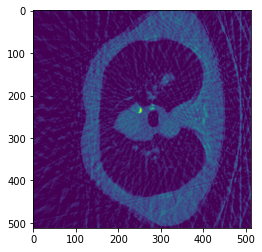
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_ddnet_0.png')
a = reconstructed[99].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_99.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_ddnet_99.png')
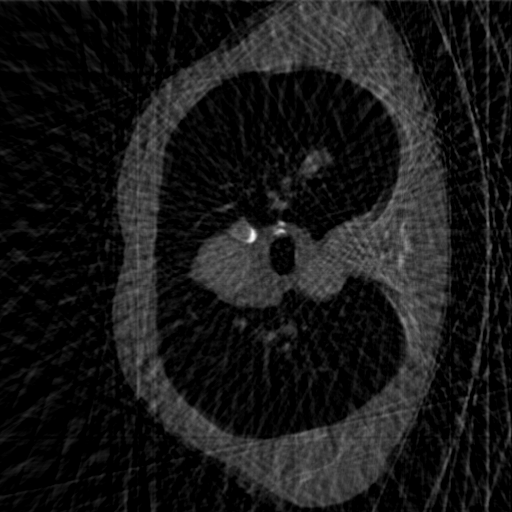
a = ldct_test[0].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_0.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_ddnet_0.png')
a = ldct_test[99].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_99.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_ddnet_99.png')
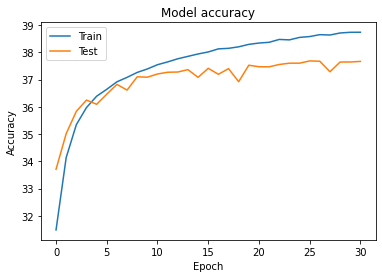
# Plot training & validation accuracy values
plt.plot(history.history['tf_psnr'])
plt.plot(history.history['val_tf_psnr'])
plt.title('Model accuracy')
plt.ylabel('Accuracy')
plt.xlabel('Epoch')
plt.legend(['Train', 'Test'], loc='upper left')
plt.show()
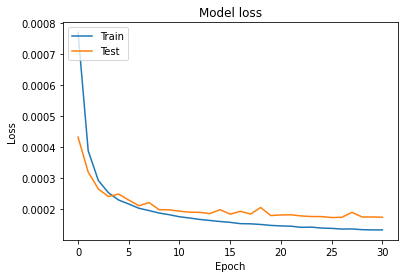
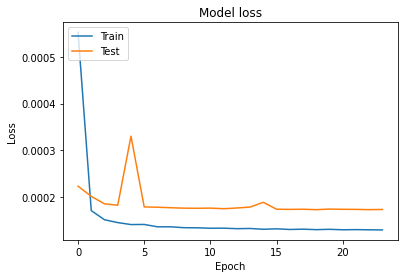
# Plot training & validation loss values
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.title('Model loss')
plt.ylabel('Loss')
plt.xlabel('Epoch')
plt.legend(['Train', 'Test'], loc='upper left')
plt.show()
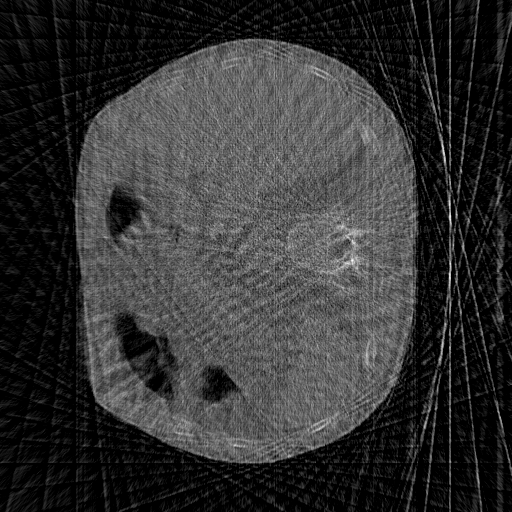
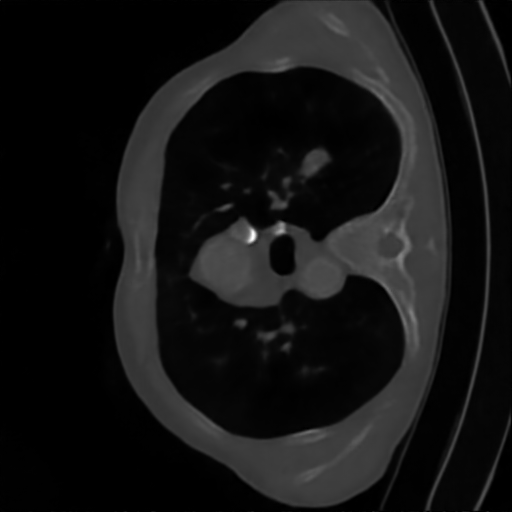
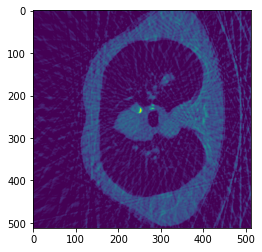
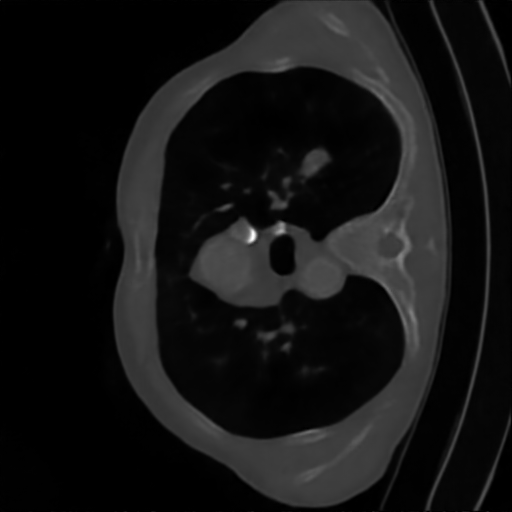
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_ddnet_0.png')
imgplot = plt.imshow(img)
plt.show()
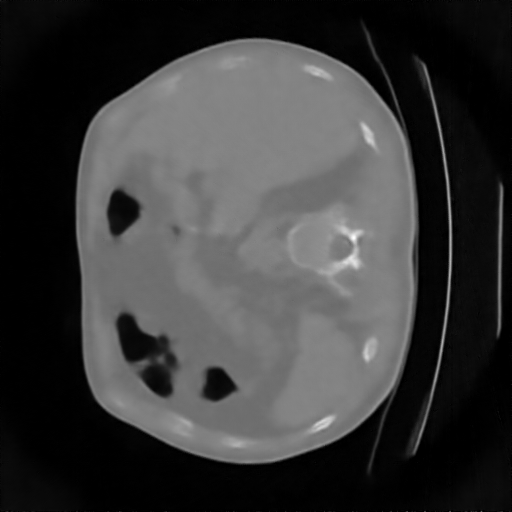
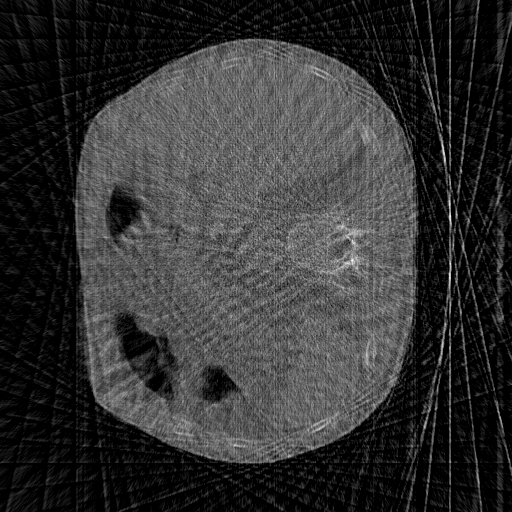
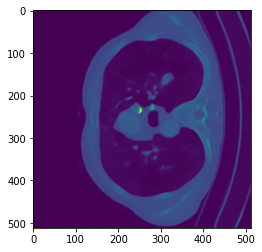
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_ddnet_0.png')
imgplot = plt.imshow(img)
plt.show()
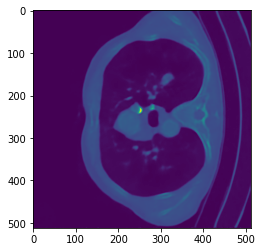
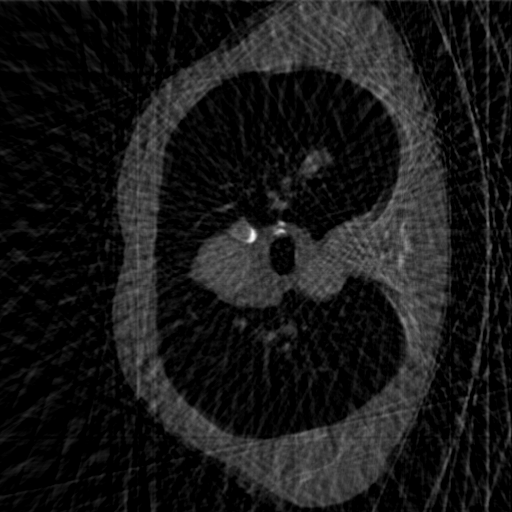
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_ddnet_99.png')
imgplot = plt.imshow(img)
plt.show()
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_ddnet_99.png')
imgplot = plt.imshow(img)
plt.show()


Second part of the model must concatenate original data with reconstructed data
# unet_model.save_weights("unet_model_1.h5")
# unet_model.load_weights("model.h5")
Need matrix 3600 images that were cleaned using first UNet
recon_train_set = unet_model.predict(ldct_train)
np.save('/content/drive/My Drive/Colab Notebooks/new_idea/recon_train_set', recon_train_set) # save the file as "recon_train_set.npy"
recon_train_set = np.load('/content/drive/My Drive/Colab Notebooks/new_idea/recon_train_set.npy') # loads saved array into recon_train_set.
two_channel_matrix = np.concatenate((recon_train_set, ldct_train), axis=3)
np.save('/content/drive/My Drive/Colab Notebooks/new_idea/two_channel_matrix', two_channel_matrix) # save the file as "recon_train_set.npy"
# two_channel_matrix = np.load('/content/drive/My Drive/Colab Notebooks/new_idea/two_channel_matrix.npy') # loads saved array into recon_train_set.
def sliced(x):
return x[:,:,:,1:2]
Second UNET has 2 channels
#train model with 2 chanels
inputs = Input((None, None,2))
c1 = Conv2D(8, (3, 3), activation='relu', padding='same') (inputs)
c1 = Conv2D(8, (3, 3), activation='relu', padding='same') (c1)
p1 = MaxPooling2D((2, 2)) (c1)
c2 = Conv2D(16, (3, 3), activation='relu', padding='same') (p1)
c2 = Conv2D(16, (3, 3), activation='relu', padding='same') (c2)
p2 = MaxPooling2D((2, 2)) (c2)
c3 = Conv2D(32, (3, 3), activation='relu', padding='same') (p2)
c3 = Conv2D(32, (3, 3), activation='relu', padding='same') (c3)
p3 = MaxPooling2D((2, 2)) (c3)
c4 = Conv2D(64, (3, 3), activation='relu', padding='same') (p3)
c4 = Conv2D(64, (3, 3), activation='relu', padding='same') (c4)
p4 = MaxPooling2D(pool_size=(2, 2)) (c4)
c5 = Conv2D(128, (3, 3), activation='relu', padding='same') (p4)
c5 = Conv2D(128, (3, 3), activation='relu', padding='same') (c5)
u6 = Conv2DTranspose(64, (2, 2), strides=(2, 2), padding='same') (c5)
u6 = concatenate([u6, c4])
c6 = Conv2D(64, (3, 3), activation='relu', padding='same') (u6)
c6 = Conv2D(64, (3, 3), activation='relu', padding='same') (c6)
u7 = Conv2DTranspose(32, (2, 2), strides=(2, 2), padding='same') (c6)
u7 = concatenate([u7, c3])
c7 = Conv2D(32, (3, 3), activation='relu', padding='same') (u7)
c7 = Conv2D(32, (3, 3), activation='relu', padding='same') (c7)
u8 = Conv2DTranspose(16, (2, 2), strides=(2, 2), padding='same') (c7)
u8 = concatenate([u8, c2])
c8 = Conv2D(16, (3, 3), activation='relu', padding='same') (u8)
c8 = Conv2D(16, (3, 3), activation='relu', padding='same') (c8)
u9 = Conv2DTranspose(8, (2, 2), strides=(2, 2), padding='same') (c8)
u9 = concatenate([u9, c1])
c9 = Conv2D(8, (3, 3), activation='relu', padding='same') (u9)
c9 = Conv2D(8, (3, 3), activation='relu', padding='same') (c9)
output_img = Conv2D(1, (3, 3), padding='same') (c9) #2 channels
print(output_img)
print(inputs)
s = keras.layers.Lambda(lambda x: sliced(x))(inputs)
print(s)
print(output_img)
noise = keras.layers.Subtract()([s, output_img])
print(noise)
unet_model2 = Model(inputs=[inputs], outputs=[noise])
unet_model2.compile(optimizer= 'adam', loss='mse', metrics=[tf_psnr])
Tensor("conv2d_57/BiasAdd:0", shape=(?, ?, ?, 1), dtype=float32)
Tensor("input_3:0", shape=(?, ?, ?, 2), dtype=float32)
-----------------
-----------------
Tensor("lambda_1/strided_slice:0", shape=(?, ?, ?, 1), dtype=float32)
Tensor("conv2d_57/BiasAdd:0", shape=(?, ?, ?, 1), dtype=float32)
Tensor("subtract_3/sub:0", shape=(?, ?, ?, 1), dtype=float32)
unet_model2.summary()
Ask why the same number of parameters as the first one?
history=unet_model2.fit(two_channel_matrix, ndct_train, validation_split=0.1, batch_size=20, epochs=100, callbacks =[es])
Train on 3240 samples, validate on 360 samples
Epoch 1/100
3240/3240 [==============================] - 40s 12ms/step - loss: 5.5299e-04 - tf_psnr: 34.0690 - val_loss: 2.2301e-04 - val_tf_psnr: 36.6335
Epoch 2/100
3240/3240 [==============================] - 38s 12ms/step - loss: 1.7058e-04 - tf_psnr: 37.7025 - val_loss: 2.0112e-04 - val_tf_psnr: 37.0598
Epoch 3/100
3240/3240 [==============================] - 38s 12ms/step - loss: 1.5103e-04 - tf_psnr: 38.2230 - val_loss: 1.8514e-04 - val_tf_psnr: 37.4245
Epoch 4/100
3240/3240 [==============================] - 38s 12ms/step - loss: 1.4493e-04 - tf_psnr: 38.4023 - val_loss: 1.8211e-04 - val_tf_psnr: 37.4944
Epoch 5/100
3240/3240 [==============================] - 38s 12ms/step - loss: 1.4072e-04 - tf_psnr: 38.5357 - val_loss: 3.3022e-04 - val_tf_psnr: 34.8510
Epoch 6/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.4096e-04 - tf_psnr: 38.5464 - val_loss: 1.7854e-04 - val_tf_psnr: 37.5808
Epoch 7/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3592e-04 - tf_psnr: 38.6781 - val_loss: 1.7788e-04 - val_tf_psnr: 37.5967
Epoch 8/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3595e-04 - tf_psnr: 38.6868 - val_loss: 1.7684e-04 - val_tf_psnr: 37.6224
Epoch 9/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3401e-04 - tf_psnr: 38.7389 - val_loss: 1.7585e-04 - val_tf_psnr: 37.6471
Epoch 10/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3377e-04 - tf_psnr: 38.7499 - val_loss: 1.7561e-04 - val_tf_psnr: 37.6527
Epoch 11/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3284e-04 - tf_psnr: 38.7768 - val_loss: 1.7597e-04 - val_tf_psnr: 37.6428
Epoch 12/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3300e-04 - tf_psnr: 38.7710 - val_loss: 1.7468e-04 - val_tf_psnr: 37.6759
Epoch 13/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3192e-04 - tf_psnr: 38.8089 - val_loss: 1.7625e-04 - val_tf_psnr: 37.6353
Epoch 14/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3234e-04 - tf_psnr: 38.7964 - val_loss: 1.7818e-04 - val_tf_psnr: 37.5857
Epoch 15/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3064e-04 - tf_psnr: 38.8524 - val_loss: 1.8839e-04 - val_tf_psnr: 37.3357
Epoch 16/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3160e-04 - tf_psnr: 38.8195 - val_loss: 1.7357e-04 - val_tf_psnr: 37.7039
Epoch 17/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3020e-04 - tf_psnr: 38.8632 - val_loss: 1.7328e-04 - val_tf_psnr: 37.7112
Epoch 18/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3085e-04 - tf_psnr: 38.8420 - val_loss: 1.7355e-04 - val_tf_psnr: 37.7039
Epoch 19/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.2982e-04 - tf_psnr: 38.8767 - val_loss: 1.7266e-04 - val_tf_psnr: 37.7271
Epoch 20/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.3055e-04 - tf_psnr: 38.8558 - val_loss: 1.7392e-04 - val_tf_psnr: 37.6948
Epoch 21/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.2954e-04 - tf_psnr: 38.8852 - val_loss: 1.7343e-04 - val_tf_psnr: 37.7072
Epoch 22/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.2988e-04 - tf_psnr: 38.8775 - val_loss: 1.7325e-04 - val_tf_psnr: 37.7117
Epoch 23/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.2950e-04 - tf_psnr: 38.8883 - val_loss: 1.7271e-04 - val_tf_psnr: 37.7250
Epoch 24/100
3240/3240 [==============================] - 37s 12ms/step - loss: 1.2925e-04 - tf_psnr: 38.8947 - val_loss: 1.7307e-04 - val_tf_psnr: 37.7156
unet_model2.save_weights("/content/drive/My Drive/Colab Notebooks/new_idea/unet_model_2.h5")
unet_model2.load_weights("/content/drive/My Drive/Colab Notebooks/new_idea/unet_model_2.h5")
To predict we should use both models
- predict with first model
- predict with second model
reconstructed = unet_model.predict(ldct_test)
psnr = cal_psnr(ndct_test, reconstructed)
print("psnr 40 epochs.....",psnr)
psnr 40 epochs..... 37.69669481448519
concatenate the denoised images from the first model and our original data
two_channel_results = np.concatenate((reconstructed, ldct_test), axis=3)
final_results = unet_model2.predict(two_channel_results)
psnr = cal_psnr(ndct_test, final_results)
print("psnr .....",psnr)
psnr ..... 37.73871974685735
# Plot training & validation accuracy values
plt.plot(history.history['tf_psnr'])
plt.plot(history.history['val_tf_psnr'])
plt.title('Model accuracy')
plt.ylabel('Accuracy')
plt.xlabel('Epoch')
plt.legend(['Train', 'Test'], loc='upper left')
plt.show()
# Plot training & validation loss values
plt.plot(history.history['loss'])
plt.plot(history.history['val_loss'])
plt.title('Model loss')
plt.ylabel('Loss')
plt.xlabel('Epoch')
plt.legend(['Train', 'Test'], loc='upper left')
plt.show()
from PIL import Image
a = reconstructed[0].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_0.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_0_sec_model.png')
a = reconstructed[99].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_99.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_99_sec_model.png')
a = ldct_test[0].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_0.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_0_sec_mod.png')
a = ldct_test[99].reshape(512, 512)
scalef = np.amax(a)
a = np.clip(255 * a/scalef, 0, 255).astype('uint8')
#result = Image.fromarray((a * 255).astype(np.uint8))
result = Image.fromarray((a).astype(np.uint8))
# result.save('unet_15_600_99.png')
result.save('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_99_sec_mod.png')
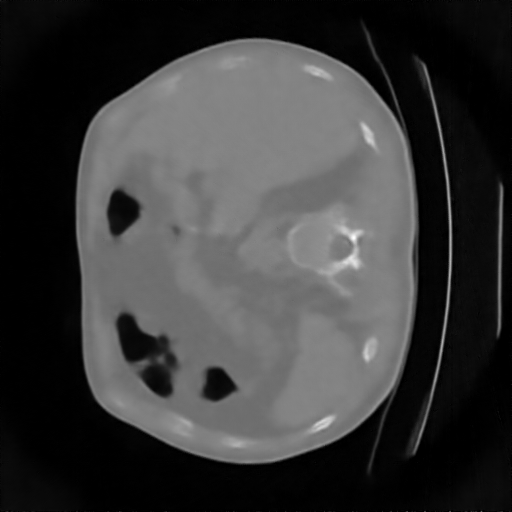
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_0_sec_mod.png')
imgplot = plt.imshow(img)
plt.show()
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_0_sec_model.png')
imgplot = plt.imshow(img)
plt.show()
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/sparseview_60_test_99_sec_mod.png')
imgplot = plt.imshow(img)
plt.show()
img=mpimg.imread('/content/drive/My Drive/Colab Notebooks/new_idea/reconstructed_99_sec_model.png')
imgplot = plt.imshow(img)
plt.show()
Final cleaned images